







在嵌入式系统和实时计算领域,时间准确性不仅仅是一种偏好——它是一项必需。在处理传感器数据时,信息到达的时间往往与信息本身同样关键。延迟、抖动和处理窗口决定了系统是安全运行还是灾难性失败。本指南探讨了一个实际案例研究,重点是使用UML时序图优化传感器数据处理流程。我们将分析如何通过可视化时间关系,使工程师能够识别瓶颈,并实施结构改进,从而提升性能,而无需增加硬件成本。
这里的目标不是引入一种新工具,而是优化建模方法。通过将关注点从数据流转向时间流,团队能够发现标准序列图常常忽略的隐藏依赖关系。本文档详细介绍了将时间约束应用于典型物联网传感器网络架构时的方法、分析过程以及可量化的成果。
📊 理解嵌入式系统中的时间约束
嵌入式系统在严格的资源限制下运行。内存、处理能力和能量都是有限的资源。当多个传感器向中央处理器输入数据时,数据采集的顺序和时间变得复杂。轮询机制可能会错过持续时间较短的事件。中断处理程序可能会导致关键任务得不到执行。如果没有清晰的时间图谱,这些问题在部署前都难以察觉。
标准流程图描述什么发生了什么。序列图描述谁与谁。时序图描述何时事情相对于彼此发生的时间。这种区别对传感器网络至关重要,因为处理信号的机会窗口由物理世界所决定。
关键时间指标
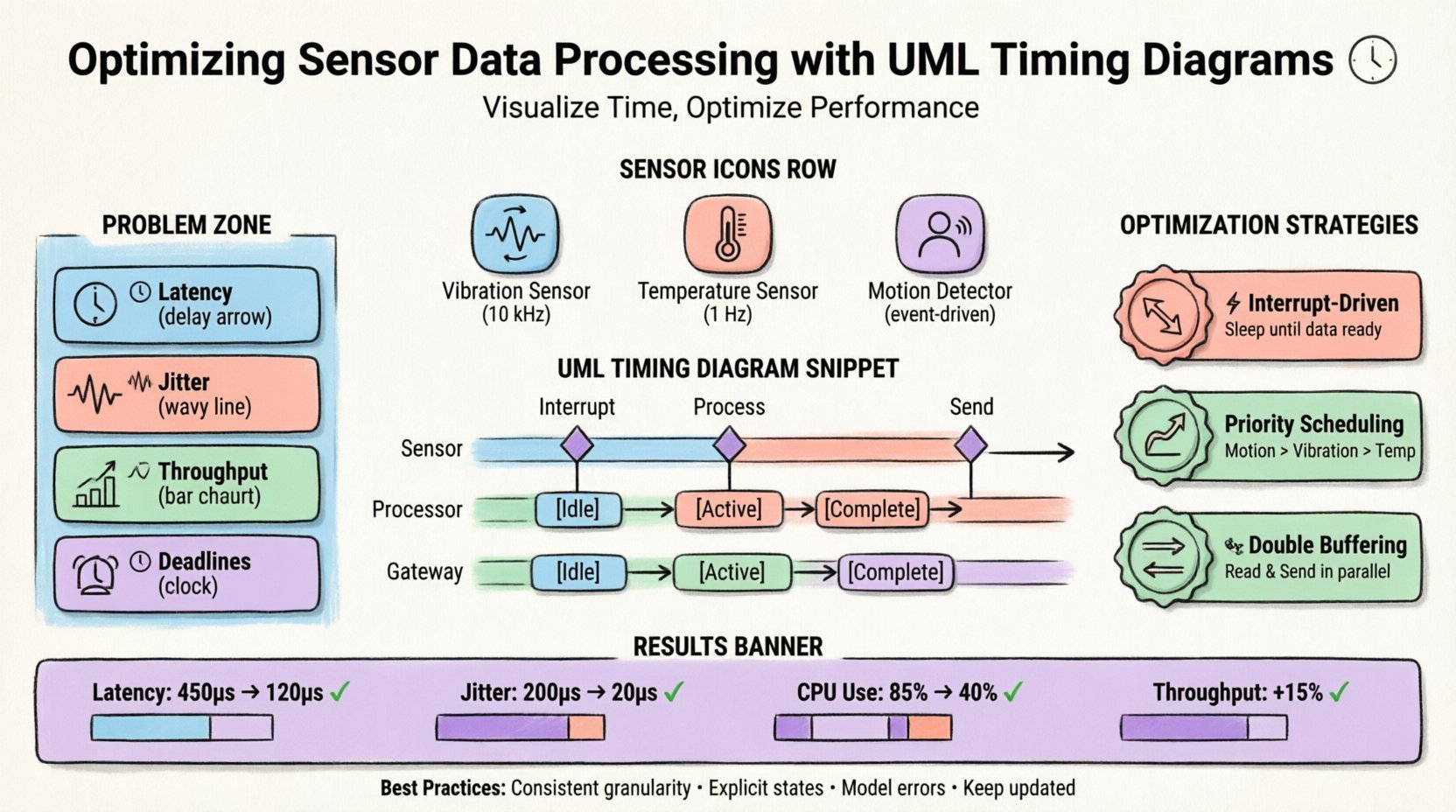
- 延迟:从传感器触发到数据可用的总延迟。
- 抖动:在多个事件之间延迟的差异性。
- 吞吐量:单位时间内处理的数据量。
- 截止时间:任务在数据失效前必须完成的最大允许时间。
解决这些指标需要一个能明确捕捉时间的模型。UML时序图为此分析提供了坐标系,使事件可以沿水平时间轴进行定位。
🛠️ UML时序图的结构
要有效利用这种建模技术,必须理解其组成部分。与关注对象交互的序列图不同,时序图关注的是对象在时间上的状态。水平轴表示时间,从左向右推进;垂直轴表示不同的对象、生命线或变量。
核心元素
- 生命线:表示对象或变量在一段时间内的存在。
- 状态发生: 表示对象处于特定状态时(例如,空闲, 活跃, 睡眠).
- 条件: 一个条件必须为真或为假的时间区间。
- 事件: 一个动作发生的特定时间点(例如,中断触发).
- 信号: 在生命线之间传递的消息,附带其时间标注。
在构建传感器处理的图表时,生命线通常代表传感器硬件、中断控制器、主处理线程和通信总线。通过精确的时间约束将它们连接起来,可以揭示数据等待的位置以及处理能力浪费的位置。
📡 传感器网络场景
考虑一个部署在工业环境中的监控系统。该系统从三个不同的数据源聚合数据:
- 振动传感器: 高频采样(10 kHz)用于机器健康监测。
- 温度传感器: 低频采样(1 Hz)用于安全阈值。
- 运动检测器: 事件驱动触发用于安全警报。
这些传感器连接到一个微控制器,该控制器必须聚合数据并将其传输到云网关。最初的方案使用单一轮询循环依次检查所有传感器。虽然实现简单,但这种方法引入了显著的延迟波动。
系统架构概览
| 组件 | 角色 | 时间要求 |
|---|---|---|
| 振动传感器 | 高速采集 | 最大100μs延迟 |
| 温度传感器 | 周期性监控 | 最大100ms延迟 |
| 运动检测器 | 事件检测 | 最大500μs延迟 |
| 云网关 | 数据传输 | 最大2秒延迟 |
挑战在于共享总线。当振动传感器请求高速访问时,温度传感器和运动传感器出现了延迟。初始模型未考虑总线竞争或中断优先级,导致在关键场景下错过截止时间。
🔍 识别延迟和抖动问题
优化的第一步是基于现有的轮询代码创建一个基准的UML时序图。这一可视化表示突显了几个关键的低效问题。
观察到的瓶颈
- 轮询开销: 主循环每秒检查振动传感器10,000次,即使没有新数据就绪。这消耗了本可用于其他任务的CPU周期。
- 中断阻塞: 运动检测器依赖中断,但振动传感器长时间占用总线,导致运动信号延迟。
- 数据缓冲: 中间数据存储在单一缓冲区中,当向网关传输数据与传感器读取同时发生时,造成了瓶颈。
时序图使抖动变得明显。运动触发与实际处理之间的时间间隔根据振动采样阶段的不同,在200μs到400μs之间变化。对于需要立即报警的安全系统而言,这种波动是不可接受的。
可视化分析
通过在时间轴上映射事件,团队发现振动采样例程是非抢占式的。它会一直占用处理器,直到整个缓冲区填满,从而阻止运动中断立即触发。图表显示了运动检测器的“信号接收”状态与“信号处理”状态之间存在明显间隔。信号接收状态与信号处理运动检测器的“信号处理”状态之间。
🚀 通过建模实现优化策略
在识别出瓶颈后,团队提出了直接在UML时序图中建模的架构变更方案。目标是降低高优先级事件的延迟,并在整个系统中平滑抖动。
策略1:中断驱动采集
不再轮询振动传感器,团队将硬件配置为在采样率下生成中断。这一改动使得主循环在数据可用前可以保持空闲状态。
- 之前: CPU每周期主动检查状态寄存器。
- 之后: CPU进入睡眠状态,直到硬件触发中断标志。
时序图通过移除重复的“检查状态”事件,并将其替换为一个单一的“中断触发”事件,该事件与传感器时钟对齐。
策略2:基于优先级的调度
为解决运动检测器的延迟问题,团队为中断实现了一个优先级队列。运动信号的优先级高于振动数据写入操作。
- 优先级1:运动检测(立即响应)
- 优先级2:振动数据存储(后台)
- 优先级3:温度记录(低优先级)
此修改确保当运动检测器触发时,振动中断处理程序会暂停当前的写入操作并立即交出控制权。时序图显示了“处理运动”生命线与“存储振动”生命线重叠,但运动任务首先完成。
策略3:双缓冲
为防止传输过程阻塞传感器读取,引入了双缓冲系统。当一个缓冲区由传感器填充时,另一个缓冲区由传输模块读取。
| 缓冲区状态 | 读取者 | 写入者 |
|---|---|---|
| 缓冲区A已满 | 传输模块 | 传感器 |
| 缓冲区B已满 | 传感器 | 传输模块 |
时序图已更新,以显示以下内容的并行执行:读取传感器 和 发送数据生命线。这消除了此前在传输总线占用时观察到的空闲时间。
📈 衡量性能提升
在实施基于时序模型的变更后,系统根据原始指标进行了重新评估。新的UML时序图成为优化状态的蓝图。
对比指标
- 平均延迟: 运动检测的延迟从450μs降低至120μs。
- 抖动: 方差从200μs降至20μs。
- CPU利用率: 由于进入睡眠模式,利用率从85%降至40%。
- 吞吐量: 由于并行处理,提升了15%。
CPU利用率的降低是次要收益。通过在传感器间隙期间允许处理器进入睡眠状态,功耗显著下降。这延长了网关单元的电池寿命,对于远程部署而言是一个关键因素。
通过时序图进行验证
最终的UML时序图起到了验证文档的作用。它证明了新架构满足了所有截止时间要求。此前显示红色警告(错过截止时间)的每个事件现在都已对齐至绿色接受区域。视觉上的确认使利益相关者对系统的可靠性充满信心。
🛡️ 时序分析的最佳实践
成功实施时序图需要纪律性,并严格遵守特定的建模标准。以下实践可确保时序图在整个开发生命周期中保持准确且有用。
1. 粒度一致性
确保图中使用的时间单位保持一致。在同一轴上混用毫秒和微秒可能导致误解。为整个模型定义一个基础时间单位。
2. 显式状态转换
不要假设状态是已知的。显式标记转换,例如等待, 执行,以及完成。状态变化的模糊性会导致错误的时序计算。
3. 包含错误处理
建模错误恢复路径的时序。如果传感器未响应,系统会等待多久才超时?此超时值应在图中清晰可见。
4. 与现实同步更新
时序图只有在与实际代码行为一致时才有效。如果实现改变了中断优先级,图必须立即更新。过时的图会带来错误的信心。
⚠️ 应避免的常见陷阱
即使经验丰富的工程师在使用时序图时也可能陷入陷阱。意识到这些常见错误有助于保持分析的完整性。
- 忽略抖动:仅关注平均延迟可能会掩盖最坏情况。始终建模最大偏差。
- 过度简化:将代表不同硬件组件的生命线合并,可能会掩盖竞争问题。应保持硬件和软件层的区分。
- 忽略中断延迟:CPU切换上下文所需的时间通常不为零。应在图中包含此项开销。
- 静态建模:对所有场景使用单一图表。不同的负载条件(例如高流量与空闲)可能需要独立的时序模型。
🔗 与其他模型的集成
尽管UML时序图功能强大,但只有与其他建模技术结合使用时才最有效。它不应孤立存在。
与状态机图的交互
使用状态机图来定义生命线内的逻辑。时序图则决定状态转换所需的时间。这种结合能清晰地阐明逻辑流程和时间约束。
与活动图的交互
活动图展示控制流。时序图展示时间流。将两者结合使用,可使团队判断逻辑流程是否在给定时间约束下高效运行。
🎯 结论
优化传感器数据处理流程需要对时间动态有深刻理解。标准数据流模型常常忽略了时间这一关键维度。通过采用UML时序图,工程团队可以明确地可视化延迟、抖动和资源竞争。
案例研究证明,从轮询架构转向基于中断和优先级的系统,显著提升了性能。时序图不仅作为文档,更作为设计工具,指导了优化过程。它使团队能够在编写代码前预测瓶颈,并在实现后验证解决方案。
对于时间是安全或性能约束的系统,这种建模方法不可或缺。它将抽象的时间要求转化为具体的视觉证据,使工程决策更加精确。随着传感器网络变得越来越复杂,实时要求日益严格,准确建模时间的能力将继续成为系统架构师的核心能力。
通过遵循所列出的最佳实践并避免常见陷阱,组织可以利用UML时序图构建稳健、高效且可靠的嵌入式系统。在准确建模上的投入将在减少调试时间、降低硬件成本和提高系统可靠性方面带来回报。