







在嵌入式系統與即時運算領域,時間準確性不僅僅是一種偏好——它是一項必要條件。處理傳感器數據時,資訊到達的時間點,往往與資訊本身同等重要。延遲、抖動與處理時間窗,決定了系統是安全運作還是災難性失敗。本指南探討了一個實用的案例研究,專注於使用UML時序圖優化傳感器數據處理流程。我們將分析如何透過視覺化時間關係,讓工程師識別瓶頸,並實施結構性調整,以提升效能,而無需增加硬體成本。
這裡的目標並非引入新工具,而是優化建模方法。透過將焦點從資料流轉向時間流,團隊能夠發現標準序列圖常忽略的隱藏依賴關係。本文詳細說明了應用時間約束於典型物聯網傳感器網路架構時的方法論、分析過程以及可量化的成果。
📊 理解嵌入式系統中的時間約束
嵌入式系統在嚴格的資源限制下運作。記憶體、運算能力與能量皆為有限資源。當多個傳感器同時輸入至中央處理單元時,資料取得的順序與時機變得複雜。輪詢機制可能錯過短暫持續的事件,中斷處理常數可能導致關鍵任務無法執行。若缺乏明確的時間地圖,這些問題直到部署後才會顯現。
標準流程圖描述什麼發生了什麼。序列圖描述誰與誰。時序圖描述何時事情相對於彼此發生的時間。這種區別對傳感器網路至關重要,因為處理訊號的機會窗口由物理世界所定義。
關鍵時間指標
- 延遲: 從傳感器觸發到資料可用的總延遲時間。
- 抖動: 多個事件之間延遲的變異程度。
- 吞吐量: 每單位時間內處理的資料量。
- 截止時間: 任務完成前允許的最大時間,超過此時間資料將失效。
處理這些指標需要一個能明確捕捉時間的模型。UML時序圖為此分析提供了座標系統,使事件可沿水平時間軸進行定位。
🛠️ UML時序圖的結構
要有效運用此建模技術,必須理解其組成部分。與專注於物件互動的序列圖不同,時序圖專注於物件在時間上的狀態。水平軸代表時間,由左向右推進;垂直軸代表不同的物件、生命線或變數。
核心元素
- 生命線: 表示物件或變數在一段時間內的存在。
- 狀態發生: 表示物件處於特定狀態時(例如,閒置, 活躍, 睡眠中).
- 條件: 一個條件必須為真或為假的時間區間。
- 事件: 一個特定時間點,其中發生動作(例如, 中斷觸發).
- 訊號: 在生命線之間傳遞的訊息,並附有其時間標記。
在構建感測器處理的圖表時,生命線通常代表感測器硬體、中斷控制器、主要處理執行緒以及通訊匯流排。透過精確的時間約束將這些元件連接起來,可以揭示資料等待的位置以及處理效能浪費的所在。
📡 感測器網路情境
考慮一個部署於工業環境中的監控系統。此系統從三個不同的來源匯集資料:
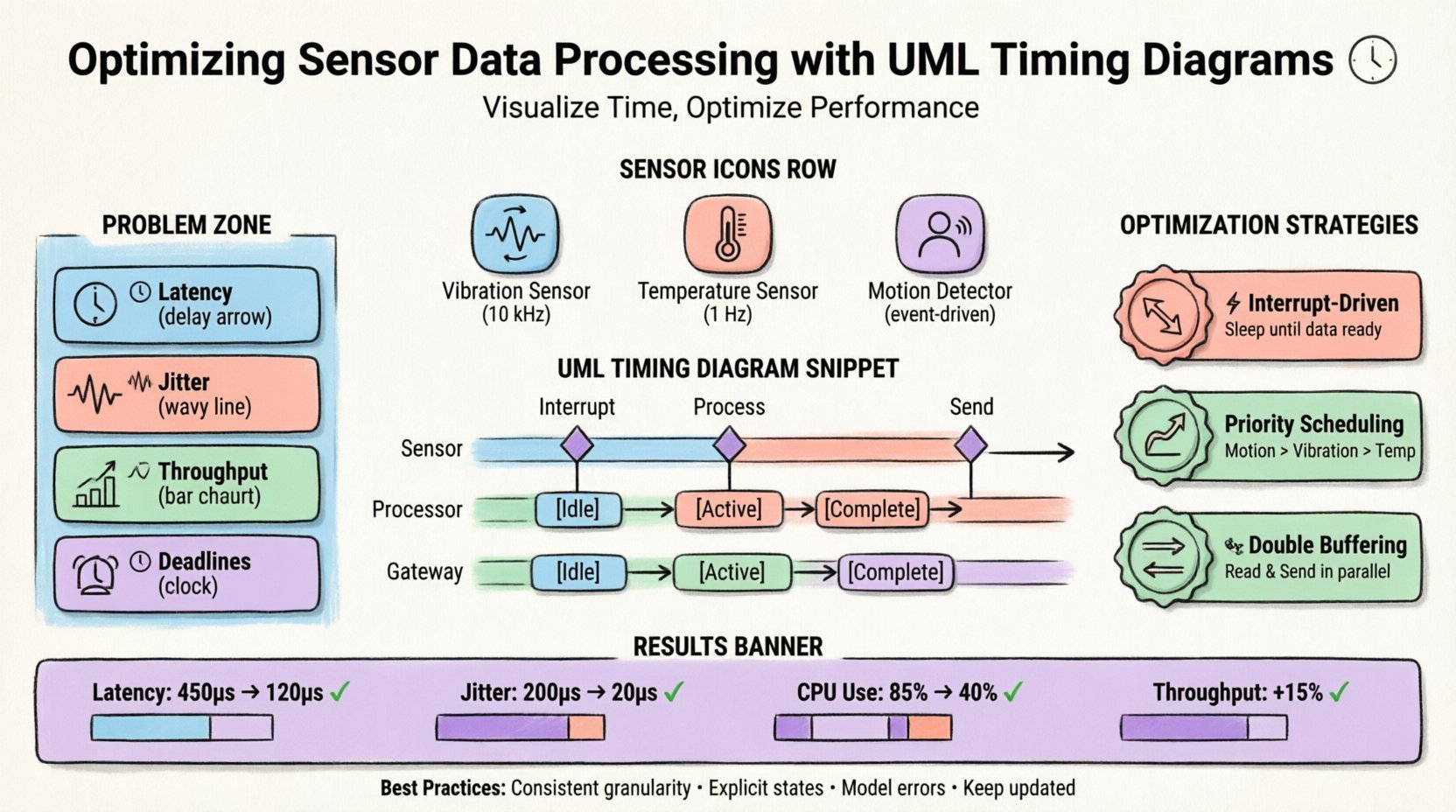
- 振動感測器: 高頻率取樣(10 kHz),用於機器健康監測。
- 溫度感測器: 低頻率取樣(1 Hz),用於安全門檻。
- 動作偵測器: 事件觸發,用於安全警示。
這些感測器連接到微控制器,該控制器必須匯集資料並傳輸至雲端閘道。最初的設計使用單一輪詢迴圈依序檢查所有感測器。雖然實作簡單,但此方法導致延遲出現顯著變異。
系統架構概觀
| 元件 | 角色 | 時間需求 |
|---|---|---|
| 振動感測器 | 高速採集 | 最大 100μs 延遲 |
| 溫度感測器 | 定時監控 | 最大 100ms 延遲 |
| 運動偵測器 | 事件檢測 | 最大 500μs 延遲 |
| 雲端閘道 | 資料傳輸 | 最大 2 秒延遲 |
挑戰在於共用匯流排。當振動感測器要求高速存取時,溫度與運動感測器便會出現延遲。初始模型未考慮匯流排競爭或中斷優先權,導致在關鍵情境下錯過了期限。
🔍 識別延遲與抖動問題
優化的第一步是根據現有的輪詢程式碼建立基準的 UML 時序圖。此視覺化表示突顯了幾個關鍵的低效率問題。
觀察到的瓶頸
- 輪詢開銷: 主迴圈每秒檢查振動感測器一萬次,即使沒有新資料可用。這消耗了本可用於其他任務的 CPU 時間。
- 中斷阻塞: 運動偵測器依賴中斷,但振動感測器長時間佔用匯流排,導致運動訊號延遲。
- 資料緩衝: 中間資料儲存在單一緩衝區中,當資料傳輸至閘道器與感測器讀取同時發生時,造成瓶頸。
時序圖使抖動變得明顯。運動觸發與實際處理之間的時間差,根據振動採樣階段的不同,從 200μs 到 400μs 不等。對於需要即時警報的安全系統而言,此差異無法接受。
視覺分析
透過將事件映射到時間軸上,團隊發現振動採樣例行程式是非搶佔式的。它會持續佔用處理器直到整個緩衝區填滿,阻止運動中斷立即觸發。圖表顯示運動偵測器的「訊號接收」狀態與「訊號處理」狀態之間存在明顯差距。訊號接收 狀態與 訊號處理 狀態之間的差距。
🚀 透過建模的優化策略
在識別出瓶頸後,團隊提出了直接在 UML 時序圖中建模的架構變更。目標是降低高優先權事件的延遲,並使系統整體的抖動趨於平穩。
策略 1:中斷驅動式採樣
團隊沒有輪詢振動傳感器,而是將硬體設定為在採樣速率下產生中斷。此變更使得主迴圈可保持閒置狀態,直到資料可用為止。
- 之前: CPU 每個週期主動檢查狀態暫存器。
- 之後: CPU 進入睡眠狀態,直到硬體觸發中斷旗標。
時序圖透過移除重複的「檢查狀態」事件,並以單一「中斷觸發」事件取代,且與傳感器時鐘對齊。
策略 2:基於優先權的排程
為解決運動偵測器的延遲問題,團隊為中斷實作了優先權佇列。運動訊號的優先權高於振動資料寫入作業。
- 優先權 1:運動偵測(立即回應)
- 優先權 2:振動資料儲存(背景執行)
- 優先權 3:溫度記錄(低優先權)
此修改確保當運動偵測器觸發時,振動中斷處理常式會暫停目前的寫入作業,並立即交出控制權。時序圖顯示「處理運動」生命線與「儲存振動」生命線重疊,但運動任務率先完成。
策略 3:雙重緩衝
為防止傳輸過程阻礙傳感器讀取,引入了雙重緩衝系統。當一個緩衝區由傳感器填滿時,另一個緩衝區則由傳輸模組讀取。
| 緩衝區狀態 | 讀取者 | 寫入者 |
|---|---|---|
| 緩衝區 A 已滿 | 傳輸模組 | 感測器 |
| 緩衝區 B 已滿 | 感測器 | 傳輸模組 |
時序圖已更新,以顯示平行執行的讀取感測器 和 傳送資料生命線。這消除了先前在傳輸匯流排被佔用時所觀察到的閒置時間。
📈 衡量效能提升
在實施由時序模型衍生的變更後,系統根據原始指標重新評估。新的UML時序圖成為最佳化狀態的藍圖。
對比指標
- 平均延遲:運動偵測的延遲從450μs降低至120μs。
- 抖動:變異從200μs減少至20μs。
- CPU使用率:由於進入睡眠模式,使用率從85%下降至40%。
- 吞吐量:由於平行處理,提升了15%。
CPU使用率的降低是一項次要效益。透過允許處理器在感測器間隙期間進入睡眠狀態,功耗顯著下降。這延長了閘道單元的電池壽命,對於遠端部署而言是一個關鍵因素。
透過時序圖進行驗證
最終的UML時序圖作為驗證文件。它證明了新架構符合所有時限要求。所有先前顯示紅色警告(逾時)的事件,現在都已對齊至綠色接受區。視覺上的確認讓利害關係人對系統的可靠性充滿信心。
🛡️ 時序分析的最佳實務
成功實踐時序圖需要紀律並遵守特定的建模標準。以下實務可確保圖表在整個開發週期中保持準確且實用。
1. 精細度一致性
確保圖表中使用的時間單位一致。在同一軸上混用毫秒與微秒可能導致誤解。為整個模型定義一個基準時間單位。
2. 明確的狀態轉換
不要假設狀態是已知的。明確標示轉換,例如等待, 執行,以及完成。狀態變化的模糊性會導致錯誤的時間計算。
3. 包含錯誤處理
模擬錯誤恢復路徑的時間。如果傳感器未能回應,系統會等待多久才超時?此超時值應在圖表中清晰可見。
4. 與現實同步更新
時間圖表只有在與實際程式碼行為相符時才有效。如果實作改變了中斷優先順序,圖表必須立即更新。過時的圖表會產生錯誤的信心。
⚠️ 應避免的常見陷阱
即使經驗豐富的工程師在使用時間圖表時也可能陷入陷阱。了解這些常見錯誤有助於維持分析的完整性。
- 忽略抖動:僅關注平均延遲可能會隱藏最壞情況。應始終模擬最大變異。
- 過度簡化:將代表不同硬體組件的生命線合併,可能會掩蓋競爭問題。應保持硬體與軟體層次的區分。
- 忽略中斷延遲:CPU 切換上下文所需時間通常不為零。應在圖表中包含此成本。
- 靜態建模:對所有情境使用單一圖表。不同的負載條件(例如高流量與閒置)可能需要獨立的時間模型。
🔗 與其他模型的整合
雖然 UML 時間圖表功能強大,但與其他建模技術整合時效果最佳。它不應孤立存在。
與狀態機圖表的互動
使用狀態機圖表定義生命線內的邏輯。時間圖表則決定轉換所需時間。這種組合能清楚說明邏輯流程與時間約束。
與活動圖表的互動
活動圖表顯示控制流程。時間圖表顯示時間流。將兩者結合使用,可讓團隊判斷邏輯流程是否在給定時間約束內高效運作。
🎯 結論
優化傳感器資料處理流程需要深入理解時間動態。標準資料流模型常忽略時間這一關鍵維度。透過採用 UML 時間圖表,工程團隊能明確可視化延遲、抖動與資源競爭。
案例研究顯示,從輪詢架構轉向中斷驅動、優先級基礎的系統顯著提升了性能。時間圖表不僅作為文件,更作為設計工具,引導優化過程。它使團隊能在撰寫程式碼前預測瓶頸,並在實作後驗證解決方案。
對於時間是安全或性能約束的系統,這種建模方法至關重要。它將抽象的時間需求轉化為具體的視覺證據,使工程決策更加精確。隨著傳感器網路變得更複雜,即時需求更嚴格,準確建模時間的能力將始終是系統架構師的核心能力。
遵循所概述的最佳實踐並避免常見陷阱,組織可以利用UML時序圖來建立穩健、高效且可靠的嵌入式系統。精確建模的投入將帶來回報,包括減少除錯時間、降低硬體成本以及提高系統可靠性。