







En el dominio de los sistemas embebidos y la computación en tiempo real, la precisión temporal no es meramente una preferencia, sino una exigencia. Al tratar con datos de sensores, el momento en que la información llega es a menudo tan crítico como la propia información. La latencia, el jitter y las ventanas de procesamiento determinan si un sistema funciona de forma segura o falla catastróficamente. Esta guía explora un estudio de caso práctico centrado en la optimización de flujos de procesamiento de datos de sensores utilizando diagramas de tiempo UML. Examinaremos cómo visualizar las relaciones temporales permite a los ingenieros identificar cuellos de botella e implementar cambios estructurales que mejoren el rendimiento sin introducir costos de hardware.
El objetivo aquí no es introducir una nueva herramienta, sino perfeccionar el enfoque de modelado. Al desplazar la atención del flujo de datos al flujo de tiempo, los equipos pueden descubrir dependencias ocultas que los diagramas de secuencia estándar a menudo pasan por alto. Este documento detalla la metodología, el proceso de análisis y los resultados medibles de aplicar restricciones temporales a una arquitectura típica de red de sensores IoT.
📊 Comprensión de las restricciones temporales en los sistemas embebidos
Los sistemas embebidos operan bajo estrictas limitaciones de recursos. La memoria, la potencia de procesamiento y la energía son recursos finitos. Cuando múltiples sensores alimentan una unidad de procesamiento central, el orden y el momento de adquisición de datos se vuelven complejos. Un mecanismo de sondeo podría pasar por alto un evento de corta duración. Un manejador de interrupciones podría privar de recursos a una tarea crítica. Sin un mapa claro del tiempo, estos problemas permanecen invisibles hasta la implementación.
Los diagramas de flujo estándar describenquéocurre. Los diagramas de secuencia describenquiénhabla conquién. Los diagramas de tiempo describencuándoocurren las cosas en relación unas con otras. Esta distinción es vital para las redes de sensores donde la ventana de oportunidad para procesar una señal está definida por el mundo físico.
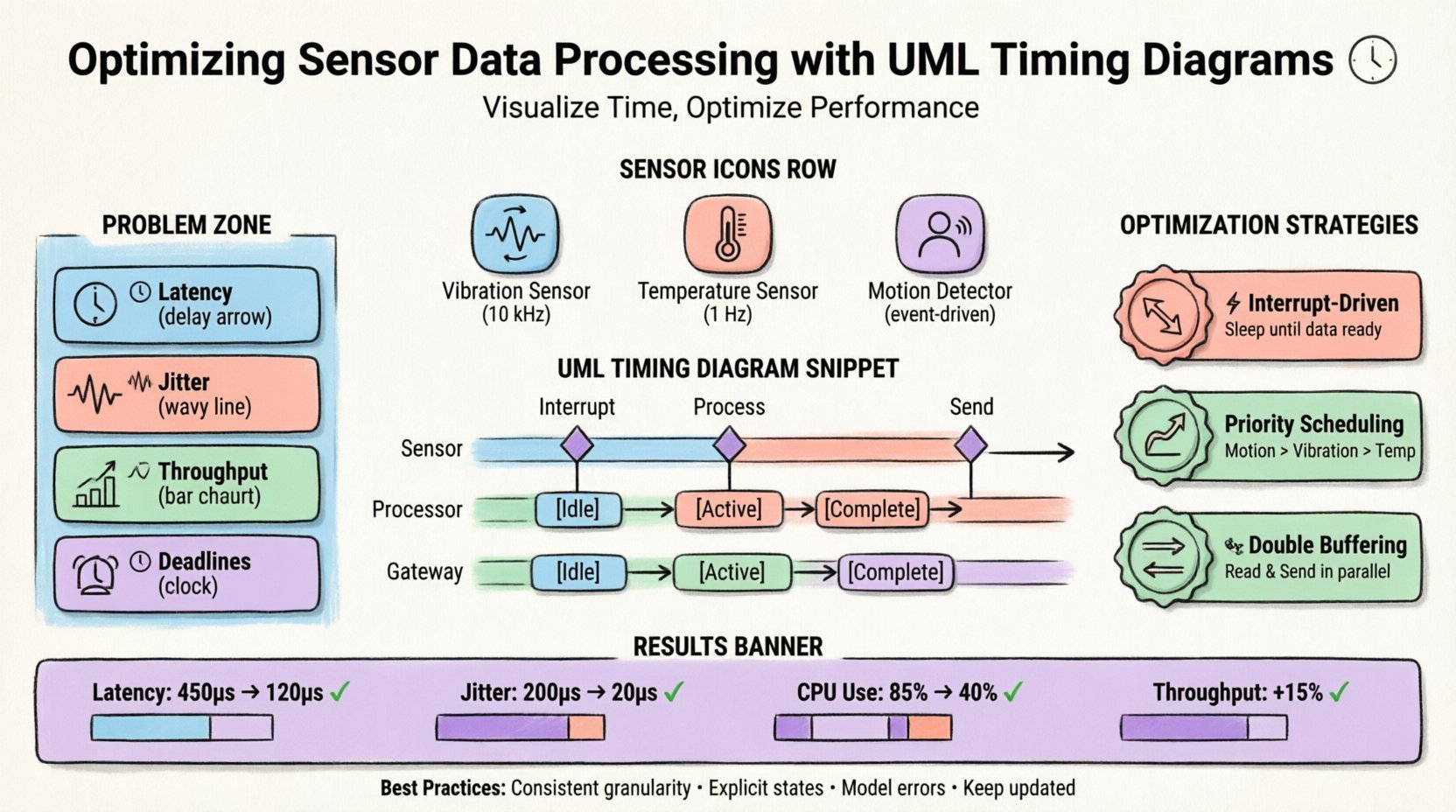
Métricas temporales clave
- Latencia: El retraso total desde el disparo del sensor hasta la disponibilidad de los datos.
- Jitter: La variación en la latencia entre múltiples eventos.
- Rendimiento: El volumen de datos procesados por unidad de tiempo.
- Plazos: El tiempo máximo permitido para que una tarea se complete antes de que los datos dejen de ser válidos.
Abordar estas métricas requiere un modelo que capture el tiempo de forma explícita. El diagrama de tiempo UML proporciona un sistema de coordenadas para este análisis, permitiendo la colocación de eventos a lo largo de un eje horizontal de tiempo.
🛠️ Anatomía del diagrama de tiempo UML
Para utilizar eficazmente esta técnica de modelado, uno debe comprender sus componentes. A diferencia de un diagrama de secuencia, que se centra en las interacciones entre objetos, un diagrama de tiempo se centra en el estado de los objetos a lo largo del tiempo. El eje horizontal representa el tiempo, progresando de izquierda a derecha. El eje vertical representa objetos distintos, líneas de vida o variables.
Elementos principales
- Línea de vida: Representa la existencia de un objeto o variable durante una duración.
- Aparición de estado: Indica cuándo un objeto está en un estado específico (por ejemplo, Inactivo, Activo, Dormido).
- Condición: Un intervalo de tiempo durante el cual una condición debe ser verdadera o falsa.
- Evento: Un punto específico en el tiempo en el que ocurre una acción (por ejemplo, Interrupción activada).
- Señal: Mensajes intercambiados entre líneas de vida, anotados con su momento temporal.
Al construir un diagrama para el procesamiento de sensores, las líneas de vida representan típicamente el hardware del sensor, el controlador de interrupciones, el hilo principal de procesamiento y el bus de comunicación. Conectar estos elementos con restricciones de tiempo precisas revela dónde los datos permanecen esperando y dónde se desperdicia el poder de procesamiento.
📡 El escenario de la red de sensores
Considere un sistema de monitoreo desplegado en un entorno industrial. Este sistema agrega datos de tres fuentes distintas:
- Sensor de vibración: Muestreo de alta frecuencia (10 kHz) para la salud de las máquinas.
- Sensor de temperatura: Muestreo de baja frecuencia (1 Hz) para umbrales de seguridad.
- Detector de movimiento: Disparador basado en eventos para alertas de seguridad.
Estos sensores se conectan a un microcontrolador que debe agrupar los datos y transmitirlos a una pasarela en la nube. El diseño inicial utilizó un único bucle de sondeo para verificar todos los sensores secuencialmente. Aunque es sencillo de implementar, este enfoque introdujo una variabilidad significativa en la latencia.
Visión general de la arquitectura del sistema
| Componente | Rol | Requisito de temporización |
|---|---|---|
| Sensor de vibración | Adquisición de alta velocidad | Latencia máxima de 100μs |
| Sensor de temperatura | Monitoreo periódico | Latencia máxima de 100ms |
| Detector de movimiento | Detección de eventos | Latencia máxima de 500μs |
| Puerta de enlace en la nube | Transmisión de datos | Latencia máxima de 2s |
El desafío residía en el bus compartido. Cuando el sensor de vibración solicitaba acceso de alta velocidad, los sensores de temperatura y movimiento experimentaban retrasos. El modelo inicial no tenía en cuenta la contención del bus ni la prioridad de interrupciones, lo que provocaba la pérdida de plazos en escenarios críticos.
🔍 Identificación de problemas de latencia y jitter
El primer paso en la optimización fue crear un diagrama de tiempo UML de referencia basado en el código de sondeo existente. Esta representación visual destacó varias ineficiencias críticas.
Cuellos de botella observados
- Sobrecarga de sondeo: La función principal verificaba el sensor de vibración 10.000 veces por segundo, incluso cuando no había nuevos datos disponibles. Esto consumía ciclos de CPU que podrían haberse utilizado para otras tareas.
- Bloqueo de interrupciones: El detector de movimiento dependía de interrupciones, pero el sensor de vibración mantenía el bus durante períodos prolongados, retrasando la señal de movimiento.
- Almacenamiento intermedio de datos: Los datos intermedios se almacenaban en un único buffer, causando un cuello de botella cuando la transmisión hacia la puerta de enlace ocurría al mismo tiempo que la lectura del sensor.
El diagrama de tiempo hizo visible el jitter. El tiempo entre el disparo de movimiento y el procesamiento real variaba entre 200μs y 400μs, dependiendo de la fase de muestreo de vibración. Esta variación era inaceptable para un sistema de seguridad que requiere alertas inmediatas.
Análisis visual
Al mapear los eventos en el eje del tiempo, el equipo identificó que la rutina de muestreo de vibración no era preemtiva. Mantenía el procesador hasta que se llenaba todo el buffer, impidiendo que la interrupción de movimiento se activara de inmediato. El diagrama mostró una clara brecha entre el estado deSeñal recibida estado y el Señal procesada estado para el detector de movimiento.
🚀 Estrategias de optimización mediante modelado
Con los cuellos de botella identificados, el equipo propuso cambios arquitectónicos modelados directamente dentro del diagrama de tiempo UML. El objetivo era reducir la latencia para eventos de alta prioridad y suavizar el jitter en todo el sistema.
Estrategia 1: Adquisición basada en interrupciones
En lugar de sondear el sensor de vibraciones, el equipo configuró el hardware para generar interrupciones a la tasa de muestreo. Este cambio permitió que el bucle principal permaneciera inactivo hasta que los datos estuvieran disponibles.
- Antes:La CPU verifica activamente el registro de estado en cada ciclo.
- Después:La CPU duerme hasta que el hardware activa la bandera de interrupción.
El diagrama de tiempos reflejó esto al eliminar los eventos repetidos “Verificar estado eventos y reemplazándolos con un solo “Disparo de interrupción evento alineado con el reloj del sensor.
Estrategia 2: Programación basada en prioridades
Para abordar la latencia del detector de movimiento, el equipo implementó una cola de prioridades para las interrupciones. La señal de movimiento se asignó una prioridad más alta que la operación de escritura de datos de vibración.
- Prioridad 1:Detección de movimiento (respuesta inmediata)
- Prioridad 2:Almacenamiento de datos de vibración (fondo)
- Prioridad 3:Registro de temperatura (baja prioridad)
Esta modificación aseguró que cuando el detector de movimiento se activara, el manejador de interrupciones de vibración pausara su operación de escritura actual y cediera el control de inmediato. El diagrama de tiempos mostró la línea de vida “Procesar movimiento línea de vida superpuesta con la “Almacenar vibración línea de vida, pero la tarea de movimiento completándose primero.
Estrategia 3: Doble almacenamiento intermedio
Para evitar que el proceso de transmisión bloquee la lectura del sensor, se introdujo un sistema de doble almacenamiento intermedio. Mientras un buffer se llenaba con datos del sensor, el otro era leído por el módulo de transmisión.
| Estado del buffer | Lector | Escritor |
|---|---|---|
| Buffer A lleno | Módulo de transmisión | Sensores |
| Buffer B lleno | Sensores | Módulo de transmisión |
El diagrama de tiempo actualizado para mostrar la ejecución paralela de los Leer sensor y Enviar datoslíneas de vida. Esto eliminó el tiempo inactivo observado anteriormente cuando el bus de transmisión estaba ocupado.
📈 Medición de mejoras en el rendimiento
Después de implementar los cambios derivados del modelo de tiempo, el sistema se volvió a evaluar frente a las métricas originales. El nuevo diagrama de tiempo UML sirvió como plano maestro para el estado optimizado.
Métricas comparativas
- Latencia promedio: Reducido de 450μs a 120μs para la detección de movimiento.
- Jitter: La varianza disminuyó de 200μs a 20μs.
- Uso de la CPU: Disminuyó del 85% al 40% debido a los modos de suspensión.
- Rendimiento: Aumentó en un 15% debido al procesamiento paralelo.
La reducción en el uso de la CPU fue un beneficio secundario. Al permitir que el procesador duerma durante los intervalos entre sensores, el consumo de energía disminuyó significativamente. Esto extendió la vida útil de la batería de la unidad de pasarela, un factor crítico para el despliegue remoto.
Validación mediante diagrama de tiempo
El diagrama de tiempo UML final actuó como un documento de validación. Demostró que la nueva arquitectura cumplía con todos los requisitos de plazos. Cada evento que anteriormente mostraba una advertencia roja (plazo incumplido) ahora se alineó dentro de la zona verde de aceptación. La confirmación visual brindó a los interesados confianza en la fiabilidad del sistema.
🛡️ Mejores prácticas para el análisis de tiempo
La implementación exitosa de diagramas de tiempo requiere disciplina y cumplimiento de estándares específicos de modelado. Las siguientes prácticas aseguran que los diagramas permanezcan precisos y útiles durante todo el ciclo de vida del desarrollo.
1. Consistencia en la granularidad
Asegúrese de que las unidades de tiempo utilizadas en el diagrama sean coherentes. Mezclar milisegundos y microsegundos en el mismo eje puede llevar a una interpretación incorrecta. Defina una unidad de tiempo base para todo el modelo.
2. Transiciones de estado explícitas
No asuma que los estados son conocidos. Marque explícitamente las transiciones como “Esperar, Ejecutar, y Completar. La ambigüedad en los cambios de estado conduce a cálculos incorrectos de tiempo.
3. Incluir el manejo de errores
Modela el tiempo de los caminos de recuperación de errores. Si un sensor no responde, ¿cuánto tiempo espera el sistema antes de expirar? Este valor de tiempo de espera debe ser visible en el diagrama.
4. Actualizar con la realidad
Un diagrama de tiempo solo es válido si coincide con el comportamiento real del código. Si la implementación cambia la prioridad de interrupción, el diagrama debe actualizarse de inmediato. Los diagramas desactualizados generan una falsa sensación de seguridad.
⚠️ Peligros comunes que deben evitarse
Incluso los ingenieros con experiencia pueden caer en trampas al usar diagramas de tiempo. La conciencia de estos errores comunes ayuda a mantener la integridad del análisis.
- Ignorar el jitter:Centrarse únicamente en la latencia promedio puede ocultar escenarios peores. Siempre modela la máxima variación.
- Simplificación excesiva:Combinar líneas de vida que representan componentes de hardware diferentes puede ocultar problemas de contención. Mantén las capas de hardware y software separadas.
- Descuidar la latencia de interrupción:El tiempo que tarda la CPU en cambiar de contexto suele no ser cero. Incluye este costo en el diagrama.
- Modelado estático:Usar un solo diagrama para todos los escenarios. Condiciones de carga diferentes (por ejemplo, tráfico alto frente a inactivo) pueden requerir modelos de tiempo separados.
🔗 Integración con otros modelos
Aunque el diagrama de tiempo UML es potente, es más efectivo cuando se integra con otras técnicas de modelado. No debería existir de forma aislada.
Interacción con diagramas de máquinas de estado
Utiliza diagramas de máquinas de estado para definir la lógica dentro de una línea de vida. El diagrama de tiempo luego determina cuánto tiempo tardan las transiciones. Esta combinación aclara tanto el flujo lógico como las restricciones temporales.
Interacción con diagramas de actividad
Los diagramas de actividad muestran el flujo de control. Los diagramas de tiempo muestran el flujo de tiempo. Usarlos juntos permite a los equipos ver si el flujo lógico es eficiente dentro de las restricciones de tiempo dadas.
🎯 Conclusión
Optimizar los flujos de procesamiento de datos de sensores requiere una comprensión profunda de la dinámica temporal. Los modelos estándar de flujo de datos a menudo ignoran la dimensión crítica del tiempo. Al adoptar diagramas de tiempo UML, los equipos de ingeniería pueden visualizar explícitamente la latencia, el jitter y la contención de recursos.
El estudio de caso demostró que pasar de una arquitectura de sondeo a un sistema impulsado por interrupciones y basado en prioridades mejoró significativamente el rendimiento. El diagrama de tiempo no sirvió solo como documentación, sino como una herramienta de diseño que guió el proceso de optimización. Permitió al equipo predecir cuellos de botella antes de escribir el código y verificar soluciones después de la implementación.
Para sistemas donde el tiempo es una restricción de seguridad o rendimiento, este enfoque de modelado es indispensable. Transforma los requisitos abstractos de tiempo en evidencia visual concreta, permitiendo decisiones de ingeniería precisas. A medida que las redes de sensores se vuelven más complejas y los requisitos en tiempo real más estrictos, la capacidad de modelar el tiempo con precisión seguirá siendo una competencia fundamental para los arquitectos de sistemas.
Al adherirse a las mejores prácticas descritas y evitando los errores comunes, las organizaciones pueden aprovechar los diagramas de tiempo UML para crear sistemas embebidos robustos, eficientes y confiables. La inversión en modelado preciso rinde dividendos en tiempo de depuración reducido, costos de hardware más bajos y mayor confiabilidad del sistema.