











複雑なシステムを設計する際、いつものが起こるタイミングは、何が起こるかを理解することと同じくらい重要です。標準的なシーケンス図は相互作用の順序を示しますが、活動の持続時間やリアルタイムシステムに必要な特定の時間制約を捉えられないことがよくあります。これがUMLタイミング図が不可欠となる理由です。
一種のUMLタイミング図は、時間の経過に伴う状態変化やメッセージのやり取りのタイミングに焦点を当てた専門的な相互作用図です。ミリ秒が重要な組み込みシステム、通信プロトコル、ハードウェアとソフトウェアのインターフェースにおいて特に有用です。このガイドでは、詳細に迷うことなく、状態変化と時間制約をモデル化する方法を詳しく解説します。
UMLタイミング図とは何か? 🧭
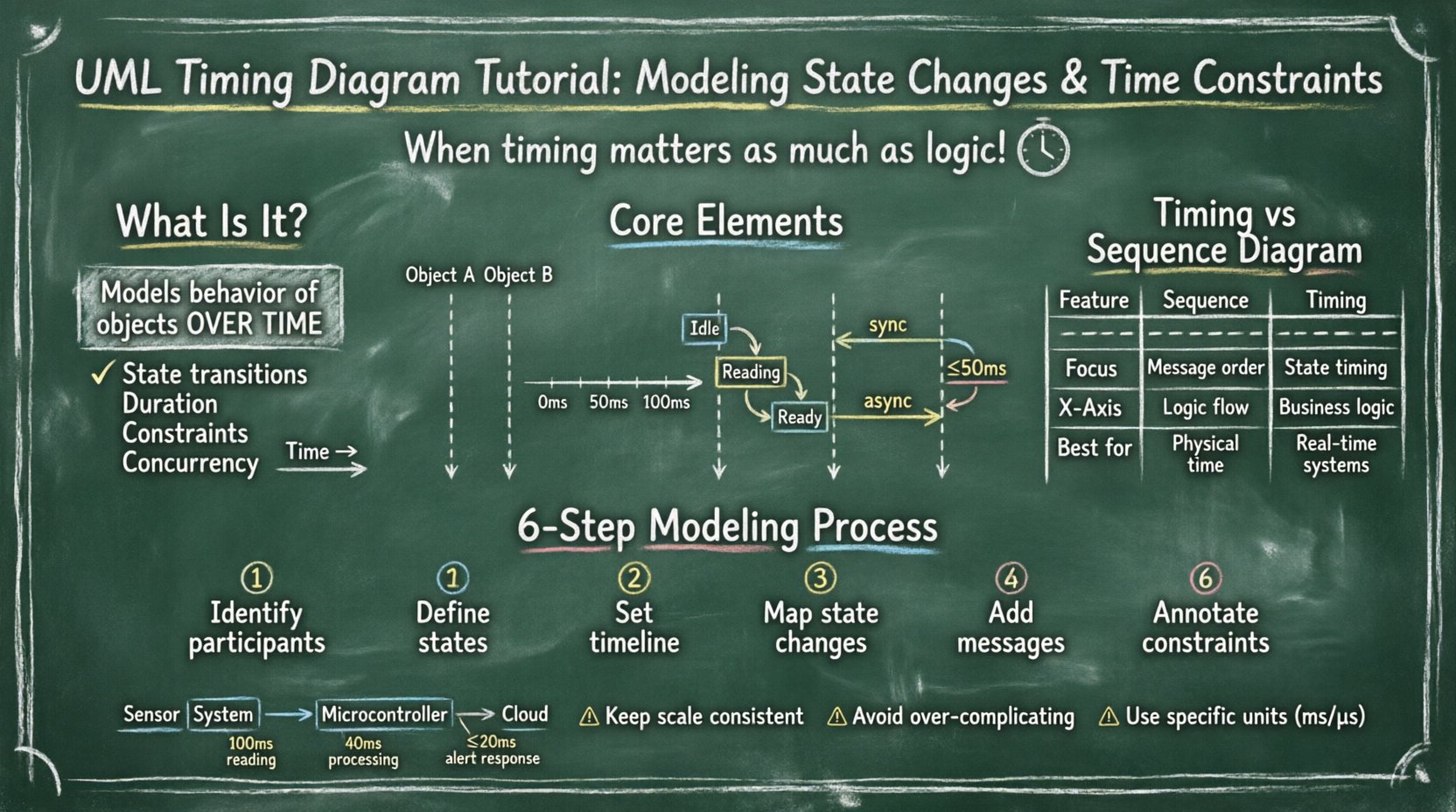
本質的に、タイミング図は時間の経過に伴うオブジェクトの振る舞いをモデル化します。構造や静的関係に注目する他のUML図とは異なり、この図は時間的ダイナミクスに重点を置きます。デザイナーが次を可視化できるようにします:
- 状態遷移:オブジェクトが一つの状態から別の状態に移動するとき。
- 持続時間:オブジェクトが特定の状態に留まる時間の長さ。
- 制約:締切、タイムアウト、最大応答時間。
- 並行性:複数のオブジェクトが同時に動作する状況。
シーケンス図と同様にライフラインという概念を共有していますが、タイミング図の横軸は相互作用の順序ではなく時間を表します。この違いにより、リアルタイム要件を正確にモデル化することが可能になります。
基本要素と表記法 📐
明確で正確な図を構築するためには、基本的な構成要素を理解する必要があります。これらの要素が連携して、時間の流れと状態を表現します。
1. ライフライン
ライフラインは、相互作用に参加するオブジェクト、コンポーネント、またはアクターを表します。タイミング図では、ライフラインは垂直の棒として描かれます。図の上部から下部へと延びており、オブジェクトがモデル化された時間期間全体に存在することを示します。
- 縦軸: オブジェクトの識別を表す。
- 横方向の延長: オブジェクトの時間にわたる存在を表す。
2. 時間軸
水平軸はタイムラインです。左から右へと進行します。数学的なグラフとは異なり、厳密なスケールは必要ありませんが、イベント間の相対的な距離は、相対的な時間間隔を反映しなければなりません。スケールを明確にするために、軸に単位(例:ミリ秒、秒)を付記できます。
3. 状態の仕様
状態の仕様はライフライン上の長方形の領域です。特定の時間間隔中にオブジェクトの現在の状態を示します。状態名は長方形の内部に記述されます。
- 状態変化: 状態仕様の境界を垂直に貫く線は、遷移を示します。
- 持続時間: 状態ボックスの幅は、オブジェクトがその状態に留まる時間の長さを表します。
4. メッセージと信号
メッセージは状態変化やアクションを引き起こします。タイミング図では、メッセージは1つのライフラインから別のライフラインへと交差する矢印として描かれます。シーケンス図とは異なり、メッセージの到着時刻が状態変化に対して正確にどのタイミングであるかが重要です。
- 同期: 送信者は、受信者がアクションを完了するのを待つ。
- 非同期: 送信者は送信後、すぐに処理を継続する。
5. タイミング制約
明示的な制約を追加して、締切や時間間隔を指定できます。これらは通常、メッセージや状態の近くにカッコやテキストの注記で示されます。
- 締切: 時刻Tより前に発生しなければならない。
- タイムアウト: 時刻Tより長く待ってはならない。
タイミング図 vs. シーケンス図 🆚
タイミング図とシーケンス図のどちらを使うべきかを理解することは、効果的なモデル化にとって重要です。両者とも相互作用を描きますが、焦点は大きく異なります。
| 特徴 | シーケンス図 | タイミング図 |
|---|---|---|
| 主な焦点 | メッセージの順序 | 状態変化のタイミング |
| 水平軸 | 論理的な時間/順序 | 物理的時間 / 持続時間 |
| 状態の可視化 | 暗黙的 | 明示的な状態ボックス |
| ユースケース | ビジネスロジックのフロー | リアルタイム制約 |
| 複雑さ | 相互作用ロジック | 時系列論理 |
システムがデッドラインの厳密な遵守を必要とする場合(たとえば、車両のブレーキシステムやネットワーク内のパケット損失処理など)、シーケンス図だけでは不十分です。タイミング図の正確さが必要です。
ステップバイステップのモデリングプロセス 🛠️
タイミング図を作成するには、混乱を避けるための構造的なアプローチが必要です。モデルが明確で正確なままになるように、以下のステップに従ってください。
ステップ1:参加者を特定する
まず、関与するオブジェクト、コンポーネント、またはハードウェアユニットをリストアップしてください。組み込みシステムでは、マイコン、センサー、アクチュエータなどが含まれるかもしれません。各参加者に対して垂直のライフラインを描いてください。
ステップ2:状態を定義する
各参加者について、関連する状態を決定してください。センサーには、たとえばアイドル, 読み取り中, キャリブレーション中、および送信中といった状態があるかもしれません。コントローラには、待機中, 処理中、およびアラート発生中.
ステップ3:タイムラインの確立
開始点(通常は時刻0)とシナリオの期間を定義する。特定の時間単位が関係する場合は、水平軸上に重要なマイルストーンをマークする。
ステップ4:状態変化のマッピング
ライフライン上に状態の長方形を描く。各長方形の幅がその状態の予想される期間に対応していることを確認する。状態変化が発生する正確な瞬間を垂直線でマークする。
ステップ5:メッセージとトリガーの追加
ライフラインの間を矢印で結び、相互作用を示す。メッセージの矢印を、それが引き起こす状態変化と一致させる。メッセージが特定の状態中に到着する場合は、それを明確に示す。
ステップ6:制約の注釈
任意のタイミング制約を追加する。たとえば、応答が50ms以内に行われる必要がある場合、そのメッセージまたは状態遷移にこの要件を注釈する。これにより、潜在的なボトルネックが明確になる。
現実世界のシナリオ:センサーによるデータ取得 📊
これらの概念を実際のシナリオに適用してみよう:産業環境における温度監視システムである。このシナリオにはセンサー、マイコン、通信モジュールが含まれる。
設定
- センサー:100msごとに温度を測定する。
- マイコン:データを処理し、クラウドに送信する。
- 通信モジュール:アップロードを処理する。
モデル
この図では、以下の流れが観察される。
- 時刻0~100ms: センサーは アイドル 状態にある。マイコンは 待機.
- 時刻100ms: トリガーシグナルがセンサーに送信される。センサーは 読み取り.
- 時間 110ms: センサーは読み取りを完了し、次に移行します。準備完了。データパケットをマイコンに送信します。
- 時間 110-150ms: マイコンは処理中。温度値を分析します。
- 時間 150ms: 温度が通常の場合、マイコンは次に移行します。アイドル。異常の場合、次に移行します。アラート.
- 制約: マイコンは異常な読み取りから20ms以内にアラートに応答しなければなりません。
この例は、タイミング図がプロセスの順序だけでなく、プロセス間の間隔や重複をどのように可視化するかを示しています。処理中状態が準備完了センサーの次の読み取り準備中(またはシステムがシングルスレッドの場合、センサーが待たなければならない)状態と重複していることがわかります。
よくある誤りとその回避法 🚫
経験豊富なモデラーでも、時間データを扱う際に誤りを犯すことがあります。こうした一般的な問題に気づいておくことで、図の整合性を保つことができます。
1. スケールの不一致
最も頻繁な誤りの一つは、現実を反映していない時間間隔を描くことです。ある状態が10ms、別の状態が100msかかる場合、視覚的な表現は1:10の比率を反映すべきです。スケールの不一致は図を誤解を招くものにします。
- 解決策: 横軸にグリッドまたは明確な時間目盛りを使用する。
2. 状態の過剰な複雑化
すべての状態変化をモデル化しようとすると、図がごちゃごちゃになります。すべての内部計算を描く必要はありません。
- 解決策: 関連する内部プロセスを1つの状態ボックスにまとめる(例:処理 代わりに データ読み取り + 検証 + フォーマット).
3. 同時性を無視する
多くのシステムは並列で動作する。すべてを順次的にモデル化すると、重要なレースコンディションを見逃してしまう。
- 解決策:適切な場所では、複数のライフラインが同時にアクティブであることを確認する。並列実行を示すために、必要に応じて積み重ねたメッセージを使用する。
4. 不明確な時間制約
次のような用語を使用する高速 または すぐには、エンジニアリング仕様には不十分である。
- 解決策: 常に明確な単位(ms、s、μs)と明確な不等式(≤、≥)を使用する。
複雑なシステム向けの高度な技術 🚀
システムの複雑さが増すにつれて、基本的なタイミング図だけでは不十分になることがある。ここでは、複雑なシナリオを扱うための高度な技術を紹介する。
1. ネストされた状態機械
複雑なオブジェクトはしばしばサブステートを持つ。これを、大きなタイミング図の中に小さなタイミング図をネストするか、状態仕様にサブステートの階層を注釈することで表現できる。
2. タイミング断片
シーケンス図と同様に、断片を使用してオプションまたは繰り返しの動作を示すことができる。たとえば、ループ断片は、センサ読み取りサイクルが無限に繰り返されることを示すことができる。
3. メッセージキュー
非同期システムでは、メッセージがキューに格納されることがあります。バッファリング遅延を示すために、キューを別個のライフラインとして、または受信者のライフライン上の特定の領域として表現してください。
4. ジッターと変動性
現実のシステムはほとんどが完全な精度で動作することはありません。正確な瞬間を示すために実線を使うのではなく、ジッター(タイミングの変動)を示すために破線または陰影付き領域を使用してください。
他のUML図との統合 🔗
タイミング図は単独で存在するものではありません。設計文書内の他の図と補完し合うものです。
- 状態機械図:状態の論理を定義するために状態機械図を使用してください。その状態がどのくらい続くかを定義するためにタイミング図を使用してください。
- コンポーネント図:タイミング図のライフラインに関与するコンポーネントを特定してください。
- 配置図:ライフラインを物理的なノード(例:CPU、センサーノード)にマッピングすることで、ネットワーク遅延を理解できます。
この統合により、時間的モデルが構造的および論理的モデルと整合されることを保証します。図の間での一貫性は、実装時の曖昧さを低減します。
ドキュメント作成のベストプラクティス 📝
ドキュメントを効果的かつ保守可能に保つために、これらのガイドラインに従ってください。
- 可読性を保つ: 図が広すぎたり複雑になりすぎた場合は、複数の図に分割してください(例:通常動作 とエラー処理).
- 一貫した記法を使用する: 使用したすべての記号や線のスタイルについて凡例を定義してください。
- バージョン管理:タイミング図をコードと同様に扱ってください。タイミング要件の変更は図の更新を引き起こし、その逆もまた然りです。
- 協働する:ソフトウェア開発者とハードウェアエンジニアの両方と図をレビューしてください。タイミング要件はしばしばこれらの分野の交差点に位置します。
結論 🏁
状態の変化と時間制約をモデル化するには、正確さと明確さが求められます。UMLタイミング図は、曖昧さなくこれらの時間的ダイナミクスを可視化するための必要な枠組みを提供します。ライフライン、状態仕様、明示的な制約に注目することで、システム設計がリアルタイム要件を満たしていることを確実にできます。
図を描くことだけが目的ではなく、システムの時間的挙動を効果的に伝えることが目的であることを思い出してください。モデルを複雑にしすぎず、スケールを一貫させ、タイミング情報を広い範囲のアーキテクチャ文書と統合してください。これらの実践を守ることで、時間に敏感なシステムの複雑さを自信を持って扱うことができます。