











インターネット・オブ・シングス(IoT)の世界では、時間は単なる指標ではなく、根本的なリソースである。デバイスは通信し、センサーは動作をトリガーし、プロセッサは厳密な時間的制約の中でリソースを管理する。マイコンがデッドラインを逸脱すると、データが失われる。ゲートウェイが信号を遅らせるならば、スマートホームシステムは応答しなくなる。こうした重要な制約を管理するために、エンジニアたちは、構造図や振る舞い図に比べてしばしば無視されがちな、特定のモデリングアーティファクトに頼っている:UMLタイミング図である。 📉
このガイドでは、組み込みシステムおよび分散システムにおけるタイミング図の技術的必要性を検討する。時間の流れを可視化することで、ハードウェアとソフトウェアの統合において高コストな誤りを防ぎ、システムの信頼性を確保できる点を検証する。
🤔 そもそもUMLタイミング図とは何か?
UMLタイミング図は、オブジェクトやコンポーネント間で交換されるメッセージのタイミング制約に焦点を当てる、相互作用図の一種である。シーケンス図がイベントの順序に注目するのに対し、タイミング図は時間の経過に伴うオブジェクトの状態に注目する。信号がいつ送信されるか、処理にどれだけ時間がかかるか、そして結果として状態変化がいつ発生するかをマッピングする。
IoTアーキテクトにとって、この違いは極めて重要である。デバイスはコマンドを受け取る(シーケンス)かもしれないが、タイミング図によって、ユーザーインターフェースや安全プロトコルが要求する50ミリ秒の時間枠内にデバイスが反応できるかどうかが明らかになる。
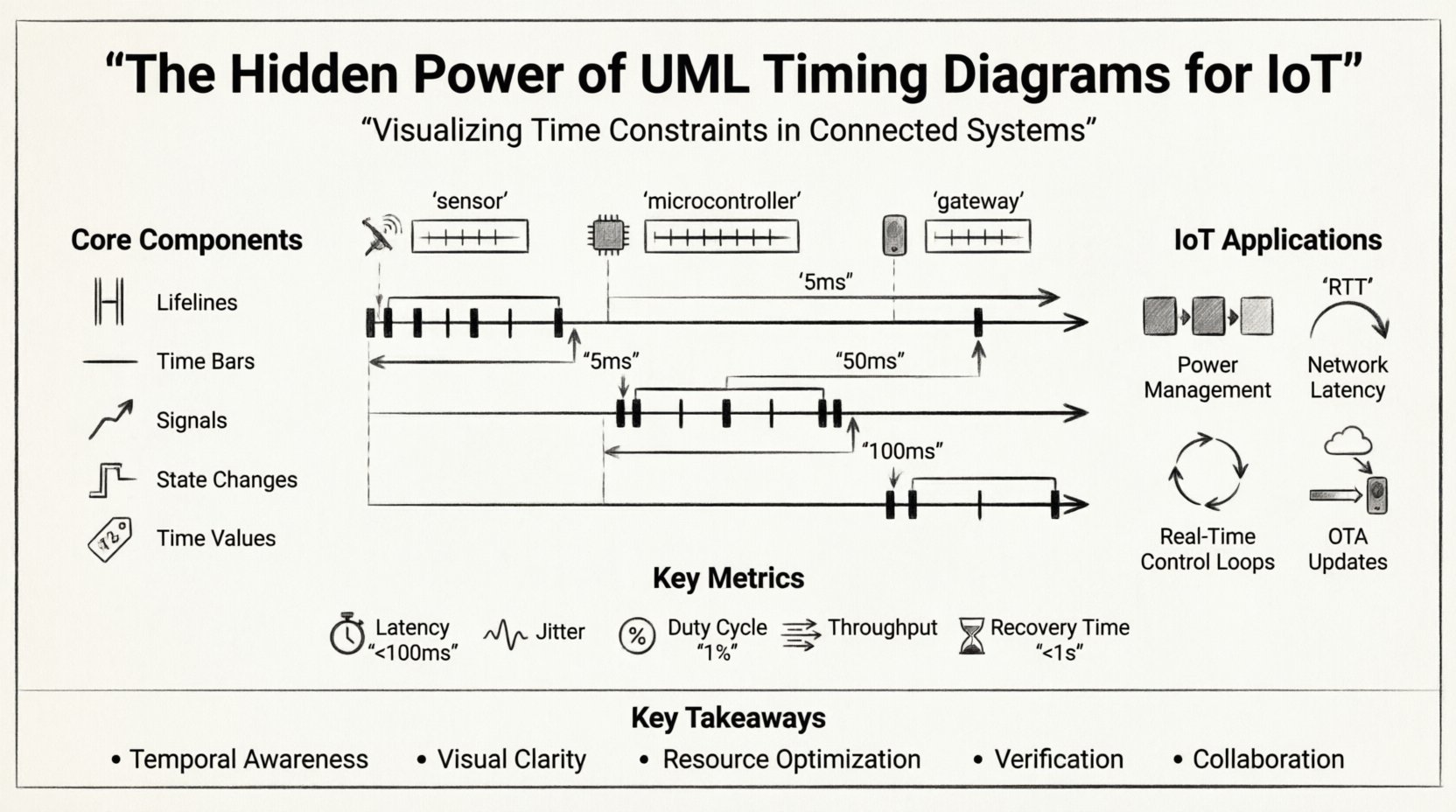
🛠 図の主要構成要素
- ライフライン:特定のオブジェクト、コンポーネント、またはハードウェアモジュールの寿命を表す垂直線。IoTでは、これらはセンサー、マイコン、またはネットワークゲートウェイを表すことが多い。
- タイムバー:ライフライン上の水平セグメントで、オブジェクトがアクティブであるか、特定の状態にある期間を示す。これにより、処理負荷やスリープサイクルが可視化される。
- 信号:ライフライン間でのデータまたは制御信号の送信を示す矢印。
- 状態変化:オブジェクトの状態の切り替えを示す垂直線(例:アイドルからアクティブ).
- 時間値:数値の注釈(例:5ms, 2s)は、相互作用の厳密な境界を定義する。
⚙️ IoTシステムが時間的モデリングを求める理由
IoT環境は本質的に多様性を持つ。低消費電力のマイコンと高速なネットワークプロトコルが組み合わされる。この組み合わせにより、複雑なタイミングの地図が生じる。標準的な設計パターンは、無線伝送、割り込み処理、省電力モードによって生じるレイテンシを捉えきれないことが多い。
🔋 電力管理とドーティサイクリング
多くのIoTノードはバッテリー駆動である。エネルギーを節約するために、データ処理を行わないスリープモードに入る。タイミング図は、スリープ状態からアクティブ状態への遷移を明示的にモデル化する。
- ウェイクアップレイテンシ: シグナルが検出された後、ハードウェアが起動するのにどのくらいの時間がかかりますか?
- 送信ウィンドウ:目覚めた直後に、無線はすぐに送信できる状態になっていますか?
- 再スリープ:システムは、バッテリー寿命を延ばすために、どれほど速く低消費電力状態に戻れるか?
これらの遷移を可視化しないと、開発者は無線を長時間アクティブに保つプロトコルを設計してしまう可能性があり、バッテリーが数日で drained されるのではなく、数年間持続するべきものが、数年ではなく数日で消耗してしまう。
📡 ネットワーク遅延とパケット損失
LoRaWAN、Zigbee、Wi-Fi上のMQTTなどの無線プロトコルは、変動する遅延をもたらします。タイミング図は、これらの遅延の許容範囲を定義するのに役立ちます。
- 往復時間(RTT):リクエストを送信して確認を受けるまでの時間。
- タイムアウトしきい値: 応答が Xミリ秒以内に到着しなければ、システムは再試行するか、ユーザーに警告しなければなりません。
- バッファリング:メッセージが古くなってしまう前に、キューでどれだけ待つことができるか?
📊 タイミング図と他のUMLモデルとの比較
他のモデルの中でタイミング図がどのように位置づけられるかを理解することは、包括的なシステム仕様を定義するために不可欠です。シーケンス図は流れを示すのに対し、タイミング図は制約を示します。
| 図の種類 | 主な焦点 | IoTにおける最適な使用例 |
|---|---|---|
| シーケンス図 | メッセージの順序 | センサーとクラウドサーバー間のハンドシェイクプロトコルを定義する。 |
| 状態機械 | 状態遷移 | スマートロックの運用状態(ロック中、ロック解除中、開いている)を管理する。 |
| タイミング図 | 期間とデッドライン | 火災センサーの作動から100ミリ秒以内に安全アラームが発動することを保証する。 |
| アクティビティ図 | ワークフロー論理 | ファームウェア更新プロセスの論理的なステップをマッピングする。 |
違いに注意してください。メッセージの順序だけをモデル化すると、メッセージが有用なタイミングに到着していないことに気づかない可能性があります。タイムイング図はそのギャップを埋めます。
🚀 実用的なシナリオ:タイミング解析を使用するタイミング
すべてのコンポーネントが詳細なタイミングモデルを必要とするわけではありません。しかし、特定のIoTサブシステムは厳密な時間的検証を要求します。
1. リアルタイム制御ループ
産業用IoT(IIoT)では、モーターコントローラーはエンコーダからのフィードバックに応答しなければなりません。制御ループが遅すぎると、モーターは振動したり、目標位置を超過したりする可能性があります。タイムイング図はセンサー読み取り、計算、アクチュエータへの書き込みサイクルをマッピングし、合計ループ時間が臨界しきい値を下回るようにします。
2. 同期プロトコル
複数のデバイスが同時に動作する必要がある場合(例:スタジアムのスマート照明や工場内の同期センサー)、クロック同期に依存します。タイムイング図はクロック間のずれと、再同期に必要な時間を示します。
3. オーバーザエア(OTA)アップデート
無線でファームウェアを更新するには、大きなペイロードをダウンロードし、整合性を検証し、メモリに書き込みます。このプロセスは重要な機能を中断してはなりません。タイムイング図は、更新ウィンドウ中に特定のデバイスが許容できる最大ダウンタイムを定義するのに役立ちます。
4. インタラプト処理
組み込みシステムはインタラプトに大きく依存しています。高優先度のインタラプト(電源障害など)は、低優先度のタスク(データのログ記録など)を中断しなければなりません。これらのプリエンプションポイントを可視化することで、バックグラウンドプロセスが忙しいために重要なイベントを逃すことがないことを保証します。
🧩 タイミングデータの構造化
有用な図を作成するには、時間の粒度を定義しなければなりません。適切な測定単位を選ぶことは明確さにとって不可欠です。
- クロックサイクル:内部プロセッサ操作に使用されます。非常に正確ですが、システムレベルの設計では抽象的です。
- ミリ秒(ms):アプリケーションレベルの遅延およびネットワークパケット送信の標準です。
- 秒(s):ユーザー向けのインタラクションおよびバッテリー消費量の計算に使用されます。
- 分/時:メンテナンスウィンドウ、長期ログ記録、スケジュールされたタスクに使用されます。
モデル化する際は、明確な変換がある場合を除き、同じ軸に異なる単位を混在させないようにしてください。一貫性があることで、エンジニアリングチームの認知的負荷が軽減されます。
⚠️ タイミングモデル作成における一般的な落とし穴
これらの図を作成するのは簡単ですが、正確なものを作成するには、自制心が必要です。いくつかの一般的な誤りが実装失敗を引き起こす可能性があります。
決定論的動作を仮定する
汎用オペレーティングシステム上で実行されるソフトウェアは、決定論的とは限らない。割り込み、ガベージコレクション、またはキャッシュミスがジッターを引き起こす可能性がある。タイミング図は、最悪実行時間(WCET)を反映すべきであり、平均ケースではない。安全に重要なIoTアプリケーションで平均値に依存することは、失敗の原因となる。
バックグラウンドプロセスの無視
多くの開発者は実行の主要スレッドをモデル化するが、バックグラウンドタスクを無視する。ログ記録タスクがセンサー読み取りタスクと同時に実行された場合、センサー読み取りのタイミングが遅延する。常に図に並行スレッドを考慮するべきである。
ハードウェア遅延の無視
ソフトウェアは真空の中で動作するわけではない。センサーはデジタル信号を送信する前に、10msの物理的応答時間を持つ可能性がある。通信バス(I2Cなど)は1バイトあたり固定遅延を持つことがある。これらのハードウェア特性は、ライフライン上にタイムバーとして含める必要がある。
📈 IoTタイミング検証のためのメトリクス
タイミング図をレビューする際は、システム性能を検証するためにこれらの特定のメトリクスを確認する。
| メトリクス | 定義 | 一般的なIoTのしきい値 |
|---|---|---|
| レイテンシ | イベントから応答までの時間 | 制御用:<100ms、テレメトリ用:<5秒 |
| ジッター | タイミングのばらつき | リアルタイムでは、ばらつきが小さいことが好ましい |
| デューティーサイクル | アクティブ時間と合計時間の比率 | バッテリー寿命を最適化する(例:1%) |
| スループット | 時間単位あたりのデータ量 | ネットワーク帯域幅に依存する |
| 回復時間 | 故障後に通常動作を再開するまでの時間 | 高可用性のため:<1秒 |
🛠 時間計測を開発ワークフローに統合する
タイミング図は単なる文書化ではなく、設計論理の一部である。以下に、エンジニアリングライフサイクルに統合する方法を示す。
- 要件段階: 要件書にタイミング制約を定義する(例:「システムは200ミリ秒以内に応答しなければならない」)
- 設計フェーズ: 提案されたアーキテクチャがこれらの制約を満たしているかを確認するために、タイミング図を作成する。
- 実装: 図を用いてハードウェアタイマーとソフトウェアタイムアウトを設定する。
- テスト: 実測されたタイミングを図と比較する。実測時間が図の値を上回る場合、設計の最適化が必要である。
- 保守: ファームウェアやハードウェアの変更によりタイミング特性が変化した場合は、図を更新する。
🔍 深掘り:信号の相互作用を分析する
IoTでよく見られる特定の相互作用パターンを見てみよう:ポーリングループである。
マイコンに接続された温度センサーを想像してみよう。マイコンは割り込みを使わず、100ミリ秒ごとにセンサーをポーリングする。
- ライフライン1(マイコン): 読み取りコマンドを送信する。
- ライフライン2(センサー): データ準備に5ミリ秒かかる。
- ライフライン2(センサー): データを戻す(2ミリ秒)。
- ライフライン1(マイコン): データを処理する(3ミリ秒)。
- ライフライン1(マイコン): 100ミリ秒のサイクルに達するまでの残り時間をスリープする。
タイミング図はこのギャップを可視化する。マイコンが3ミリ秒ではなく60ミリ秒かけてデータを処理する場合、スリープサイクルは短くなり、電力消費が急増する。この可視化により、エンジニアは1行のコードも書く前に非効率を発見できる。
🌐 分散システムと時計のずれ
分散型IoTシステムでは、デバイスが単一の時計を共有しない。ネットワーク時刻や内部発振器に依存する。時間の経過とともに、これらの時計はずれる。
タイミング図は同期戦略を計画するのを助ける。同期パケットを送信できる機会の窓と、受信デバイスが内部時計を調整するために必要な時間を示す。ずれが大きすぎる場合、図は標準NTPではなく、より堅牢なプロトコル(例:精密時刻プロトコルPTP)の導入が必要であることを強調する。
📉 同時実行の可視化
IoTデバイスはしばしば複数のタスクを実行する。タイミング図は、同じライフライン上でこれらのタスクが並行して実行されている様子を示すことができる。
- タスクA: 高優先度、10ミリ秒ごとに実行される。
- タスクB:低優先度、100msごとに実行される。
タスクBが50ms実行されると、その期間中、タスクAがブロックされる。図からタスクAのデッドラインが守られているかが明らかになる。デッドラインを守れないと安全上のリスクが生じるシステムでは、これが極めて重要である。
🎯 デザイナーのための最終的な考慮事項
UMLタイミング図の採用には、「何が起こるか」から「いつ起こるか」への思考の転換が必要である。この転換は容易ではないが、信頼性の高いIoT設計には不可欠である。
- シンプルから始める:システム全体の1ミリ秒単位までモデル化しないでください。まずは重要な経路に注目してください。
- 標準的な記法を使用する:すべてのチームメンバーが記号を理解していることを確認してください。一貫性が鍵です。
- データで検証する:プロファイリングツールを用いて実際のタイミングデータを収集し、図を精緻化してください。
- 制約を共有する:タイミング要件をソフトウェア開発者だけでなく、ハードウェアエンジニアにも可視化してください。
時間の要素を設計の中心に据えることで、レイテンシーバグや電力障害、同期問題のリスクを低減できます。タイムラインをモデル化するための努力は、システムの安定性とパフォーマンス向上という恩恵をもたらします。
🔗 主なポイントの要約
- 時間への意識:IoTシステムは時間に敏感である。遅延は重要である。
- 視覚的明確さ:タイミング図は時間の経過に伴う状態変化を示し、シーケンス図を補完する。
- リソース最適化:パフォーマンスの要件とバッテリー寿命の制約のバランスを取るのを助ける。
- 検証:テストやパフォーマンスチューニングの基準を提供する。
- 連携:ハードウェアの制約とソフトウェアの論理の間の溝を埋める。
次世代の接続デバイスを設計する際には、タイミング解析を省略しないでください。それはシステムが論理的にだけでなく、時間的にも正しく動作することを保証する、隠れた信頼性の層です。